首页 → 科技成果 → 内容详情
河北工业大学“双五星”专利推介(高端装备制造)
时间:2026-01-06 作者: 访问量:
为深入贯彻落实《国家知识产权局关于纵深推进专利转化运用专项行动加快形成长效机制的通知》(国知发运字【2025】16号)和《关于重点推进“双五星”专利转化运用 加快实施一批专利产业化项目的通知》(国知办函运字〔2025〕633号),加快推进专利转化运用,加速科技成果向现实生产力转化,我校启动“双五星”专利系列推介工作,推动高价值专利转化实施和产业化落地。本期重点聚焦高端装备制造。
(“双五星”专利是指在高校和科研机构存量专利盘活系统中,高校和科研机构自评价值为五星级、且有一家及以上企业他评价值为五星级的专利。)
1、专利名称:一种工业机器人打磨工艺优化方法
专利号:ZL202210058614.X
发明人:韩旭,段书用,李本旺,陶友瑞,赵赢
拟转化方式:许可
技术成熟度:批量生产、成熟应用阶段
专利简介:
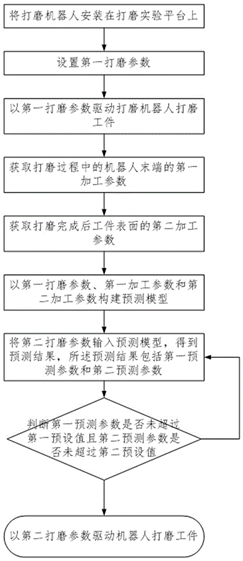
本发明提供了一种工业机器人打磨工艺优化方法,包括如下步骤:将打磨机器人安装在打磨实验平台上;设置第一打磨参数;以第一打磨参数驱动打磨机器人打磨工件;获取打磨过程中的机器人末端的第一加工参数;获取打磨完成后工件表面的第二加工参数;以第一打磨参数、第一加工参数和第二加工参数构建预测模型;将第二打磨参数输入预测模型,得到预测结果;判断预测结果,更新第二打磨参数并驱动机器人打磨工件。本申请所述的打磨工艺优化方法通过构建预测模型,分析预测加工结果,选择最优的加工方式,加快工件表面的质量检测,提高自动化生产的效率。
2、专利名称:一种基于二阶贝塞尔曲线的机器人连续路径优化方法
专利号:ZL202210116904.5
发明人:韩旭,段书用,陆文涛,裴文良,章霖鑫,赵熙灼,徐福田
拟转化方式:许可
技术成熟度:批量生产、成熟应用阶段
专利简介:
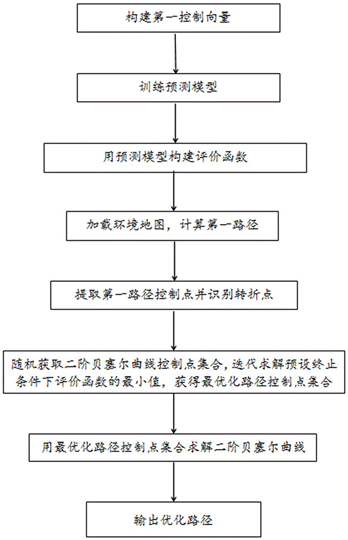
本申请提供有一种基于二阶贝塞尔曲线的机器人连续路径优化方法,首先用二阶贝塞尔曲线控制点得到的第一控制向量对BP神经网络进行训练得到预测模型,然后以预测模型为基础,综合考虑路径可行性、安全性、运行效率因素,构建评价函数,将路径规划问题转化为最优化求解问题,对实际路径进行迭代求解,得到满足终止条件的最优路径二阶贝塞尔曲线控制点组成的集合,输入二阶贝塞尔曲线函数求解出各转折点对应的二阶贝塞尔曲线,得到优化路径。本申请能够对图搜索类和随机采样类传统路径规划算法进行后优化处理,较好的满足了机器人连续行进的要求,既提高了电机使用寿命,也提高了路径优化处理的效率,具有求解速度快、安全性高、平滑性好的优点。
3、专利名称:一种机器人伺服驱动器IMC的共模峰值抑制方法
专利号:ZL202210222018.0
发明人:韩旭,李珊瑚,鲁紫荆,陶友瑞,操孙鹏,段书用
拟转化方式:许可
技术成熟度:批量生产、成熟应用阶段
专利简介:
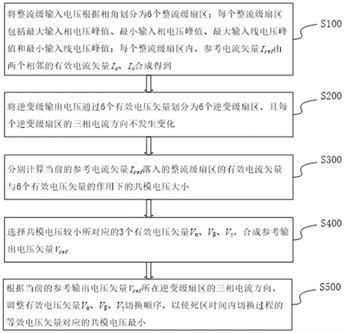
本申请提供一种机器人伺服驱动器IMC的共模峰值抑制方法,包括以下步骤:将整流级输入电压根据相角划分为6个整流级扇区;每个整流级扇区内,参考电流矢量由两个相邻的有效电流矢量合成得到;将逆变级输出电压通过6个有效电压矢量划分为6个逆变级扇区;分别计算当前的参考电流矢量落入的整流级扇区的有效电流矢量与6个有效电压矢量的作用下的共模电压大小;选择共模电压较小所对应的3个有效电压矢量Vα、Vβ、Vγ,合成参考输出电压矢量;根据当前的参考输出电压矢量所在逆变级扇区的三相电流方向,调整有效电压矢量Vα、Vβ、Vγ切换顺序。本申请提供的方法可以将共模电压抑制到29%,且消除了死区效应产生的共模电压尖峰。
4、专利名称:一种用于电化学体系的原位载荷加载装置
专利号:ZL202022148323.9
发明人:邓齐波,陈涛
拟转化方式:转让
技术成熟度:批量生产、成熟应用阶段
专利简介:
本实用新型一种用于电化学体系的原位载荷加载装置,包括导轨位置调整机构、导轨机构、载荷施加机构和基座;导轨位置调整机构用于实现导轨机构在0~90°范围内的转动,并能实现导轨机构的固定,进而调节载荷施加机构的池体内待测试工件的倾斜角度;所述载荷施加机构包括上连杆、池体、导电下拉杆、压力传感器和螺旋测微仪;上拉杆固定在陶瓷促动器的作用端,上拉杆和导电下拉杆分别与待测试工件的上、下端相连,待测试工件位于池体内。该装置通过导轨位置调整机构实现导轨在0~90°范围内的倾角调节,调节待测试工件与外部物理场作用方向之间的夹角,以研究能源材料在不同物理场作用方向下的表面电化学性能,装置的利用率高,适用性更强。
5、专利名称:一种集装箱底梁矫形机器人
专利号:ZL202010063807.5
发明人:刘今越,翟志国
拟转化方式:许可
技术成熟度:小批量生产、工程应用阶段
专利简介:
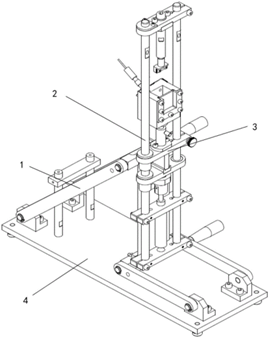
本发明一种集装箱底梁矫形机器人,包括Z向支撑平台、Y向微调机构、X向微调机构、加热装置和移动底盘;Z向支撑平台包括矫形架和液压缸;X向微调机构安装在移动底盘上,Y向微调机构安装在X向微调机构上,在X向微调机构的作用下Y向微调机构沿移动底盘的短边方向移动;Z向支撑平台安装在Y向微调机构上,在Y向微调机构的作用下Z向支撑平台沿移动底盘的长边方向移动;矫形架在液压缸的作用下竖直移动,对集装箱底梁施加竖直向上的力;加热装置安装在Z向支撑平台的上部,对集装箱底梁加热。该矫形机器人可以实现集装箱底梁的矫形,弥补了人工矫形的不足。
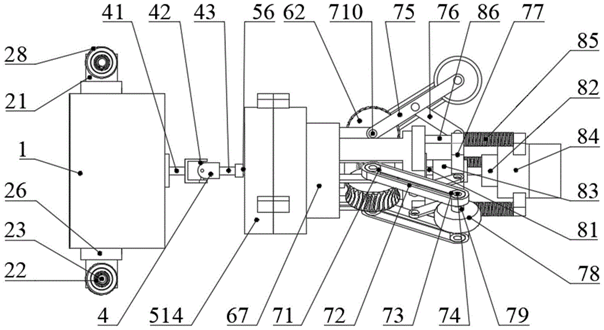
6、专利名称:一种基于柔性偏转关节的核电装备立面仿尺蠖检测机器人
专利号:ZL202322379216.0
发明人:李满宏,宋广泽,焦鑫,赵政阳,罗文博,张蕊,杜辉翔,刘镓
拟转化方式:转让
技术成熟度:试生产、应用开发阶段
专利简介:
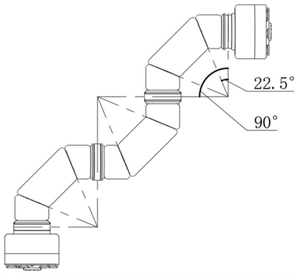
一种基于柔性偏转关节的核电装备立面仿尺蠖检测机器人,包括仿尺蠖肢体结构体和分别连接于仿尺蠖肢体结构体两端的两个足端吸附检测结构体;所述仿尺蠖肢体结构体由三个相同的肢体模块组成,每个肢体模块包括一个主偏转肢节、两个副偏转肢节、电机连接法兰、关节驱动电机、模块连接组件和柔性套管,副偏转肢节安装在主偏转肢节的两端部,模块连接组件安装在副偏转肢节的外端面;所述柔性套管由弹性体材料制成,柔性套管紧密包覆于肢体模块外壁,柔性套管的两端分别与模块连接组件固连;利用柔性套管对肢体各关节的主被动刚度调控实现仿尺蠖肢体结构体的柔顺运动,所述足端吸附检测结构体包括足端安装底座、足端端盖、接触式检测探头和足端吸附模块。
7、专利名称:车载在线实时监测汽油辛烷值系统
专利号:ZL 201810816612.6
发明人:薛刚,王丽银,梁金生,赵光远,罗雄一
拟转化方式:许可
技术成熟度:样品、试验阶段
专利简介:
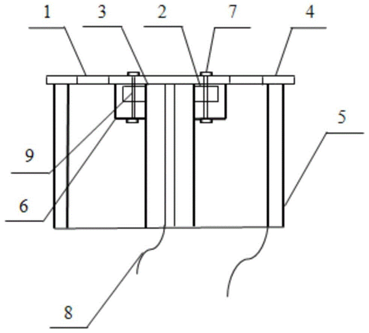
本发明为车载在线实时监测汽油辛烷值系统。该系统包括监测汽油辛烷值的介电材料监测器和STM32处理器,所述的监测器的组成包括DMC防爆块、内芯电极、端盖、外环电极和防爆托盘;其中,所述的内芯电极为圆柱状,中心有自上而下的通孔;其外部套有高度相同的圆筒状的外环电极,内芯电极和外环电极均为陶瓷介质;外环电极和内芯电极的顶部,通过密封胶固定有端盖;端盖下固定有DMC防爆块和防爆托盘;端盖上设置有流出孔道;内芯电极和外环电极分别和导线相连,导线穿过内芯电极的通孔,与STM32处理器输入端连接。本发明的车载在线实时监测汽油辛烷值系统具有灵敏度高、稳定性好、响应—恢复时间快和实时性强等特点。
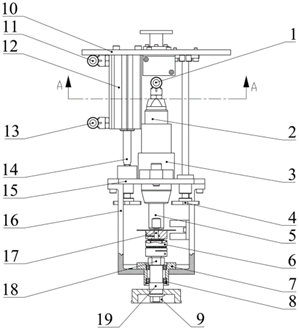
8、专利名称:一种大型曲面气动柔性打磨装置
专利号:ZL201910010487.4
发明人:张慧博,王小军,戴士杰,张帅,周润天
拟转化方式:许可
技术成熟度:样品、实验阶段
专利简介:
本发明为一种大型曲面气动柔性打磨装置,包括支撑组件、柔性组件、打磨组件、气动组件及控制系统;支撑组件中的气缸使用两个电气比例阀,气缸工作口B连接的电气比例阀可以实时补偿重力,气缸工作口A连接的另一个电气比例阀可以提供打磨力,通过一维力传感器可以实时监测实际输出的法向打磨力,当监测值不符合要求时,可以实时反馈给电气比例阀调整气缸气压满足法向打磨力要求。通过力传感器反馈的压力值,实时调节气缸推杆的拉力或压力,在不同打磨位姿下能够实时补偿重力分量,维持恒定的法向打磨力,实现柔顺打磨。该打磨装置能够实现柔性打磨,有效避免刚性冲击,且具有高转速、大扭矩、轻质量、加工效率高等特点。
9、专利名称:一种自适应自主转向的轮式管道机器人
专利号:ZL201910946546.9
发明人:张建华,赵岩,薛原,徐立前,李辉
拟转化方式:转让
技术成熟度:样品、实验阶段
专利简介:
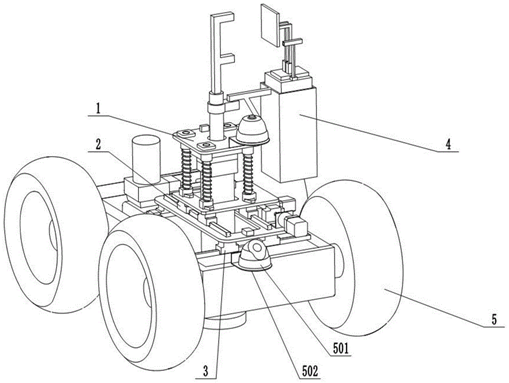
本发明公开了一种自适应自主转向的轮式管道机器人,包括箱体、弹性伸缩臂、第一驱动机构、连接机构、行星轮系机构、蜗轮蜗杆机构、皮带传动机构、第二驱动机构、第一制动器和第二制动器。通过弹性伸缩臂绕竖直轴的旋转和蜗轮蜗杆机构将动力通过涡轮传递至皮带传动机构的滚轮b,使滚轮b沿管壁向前运动,实现机器人的转弯,有效地解决了管道机器人自主转向的问题。通过弹性伸缩臂和皮带传动机构的协同作用以适应管径的变化,通过万向节叉实现箱体与行星轮系机构的柔性连接,增强了机器人的自适应性。
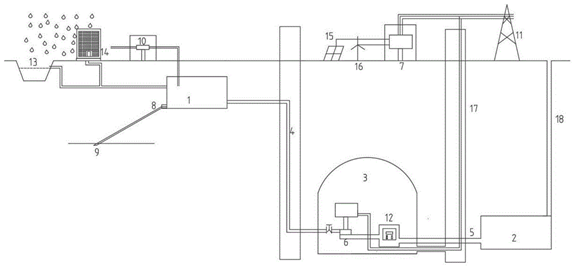
10、专利名称:一种以废弃矿井作为抽水储能容器的抽水蓄能系统
专利号:ZL202210941548.0
发明人:张德成,张国庆,张小刚,宋宇琪,高 ,万俊杰,唐浩,江新坤
拟转化方式:转让
技术成熟度:样品、实验阶段
专利简介:
本发明为一种以废弃矿井作为抽水储能容器的抽水蓄能系统,该系统包括地下上水库、引水隧道、水电站、尾水隧洞、下水库,其中地下上水库与城市的排涝网路和河流的排汛管道相连,且地下上水库通过地下水回补装置与地下的含水层相连;所述地下上水库位于原有煤矿的竖井位置;所述水电站位于地下矿洞位置,所述下水库位于废弃煤矿的采空区,下水库与通风井相连;水电站设置交通井与地面相连接;所述地下上水库与水电站之间通过引水隧道连通,水电站与下水库通过尾水隧洞连通;在水电站内设置可逆式水泵水轮机机组和污水处理系统。该系统能够调蓄昼夜用电负荷的波动和新能源供电的不稳定性,并具有防止城市洪涝和调节地下水位的作用。
转化实施洽谈请联系河北工业大学技术转移中心
联系人:王老师
联系电话:022-60438356